
摘 要: 在设计了充电站的硬件电路(包括电源电路、可由软件及硬件调节充电电流的电池恒流充电电路及定位编码信号发射电路)的基础上,提出了一种机器人采用随机行走模式在未知环境下自动找寻充电站的全新自主充电算法,使机器人具备自主找寻充电站充电的能力。
0 引言
自主清洁机器人作为服务机器人的一种,能够使人们从繁重的清洁工作中解脱出来,具有广泛的应用前景。目前清洁机器人已经进入实际家庭使用,如伊莱克斯公司的“三叶虫”、Kent公司设计出清扫机器人、国产清扫机器人KV8。当机器人电量不足时,能够自动地返回充电站进行充电是现有机器人的一个实用功能,根据家居智能清洁机器人的自动充电功能需求,与苏州某公司合作开发设计了一款低成本、能自主充电的适用型家居智能机器人,目前已投入生产,效果良好。
1 充电站硬件设计
充电站主要负责与机器人的红外通信,发射召回信号,引导机器人自动返回充电站进行充电。机器人在电量充足时对充电站发出的信号不做响应,当检测到自身电量不足时,机器人通过充电站发射的红外召回信号及相应算法自动返回充电站充电。
1.1 充电站结构
机器人在电池电量不足时能够在消耗最少电量情况下以较短路径自主返回充电站,是其能够长期高效率自主工作的重要环节。为了保证机器人自主返回充电,充电站的结构和电气设计必须满足要求,充电站外形如图1所示。

充电站包括外壳、两片充电触点、电源指示灯、上对接红外发射器和下对接红外发射器[1]。在清洁机器人底部有正负两个金属充电电极,在充电站上有两片金属触点,当充电电极与金属片接触上即可进行充电。清扫机器人前端中间位置装有两个红外接收管,它们之间的夹角为45°,清扫机器人前端顶部也装有一个红外接收管,并在其上方安装了光学全反射元件,即广角接收,使得清扫机器人能够在360°的有效范围内都能接收到来自充电站的信号。
1.2 充电站工作原理
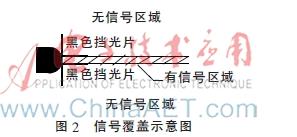
充电站的上、下两组发射器均发出红外调制编码信号,供机器人寻找充电站时定位使用。自主返回充电的基本要求就是精确对准,以便机器人的充电电极和充电站上的充电触点可靠连接进行充电。由于红外发射管的信号区域接近于一个扇形,难以实现机器人和充电站的精确对接,因此本设计在红外发射管前方添加黑色塑料挡光片,挡光片之间留一个窄缝,这样发射信号区域几乎成一条直线,其有效距离约为4 m,宽度为0.1~0.3 m。这样,清扫机器人寻找充电站的活动区域便分为两个部分,有信号区和无信号区。有信号区是一个狭长的区域,长度约为4 m,宽度为0.1~0.3 m。这个区域外为无信号区。信号覆盖示意图如图2所示。
1.3 充电站硬件电路设计
1.3.1 电池恒流充电电路设计
由于机器人所使用的电池为14.4 V直流镍氢电池,采用恒流方式进行充电,为此需要设计充电所需的恒流源电路,为电池充电时提供稳定的充电电流[2-4]。

恒流源电路如图3所示。电路采用两级运放,第一级运放组成一个电压跟随器,提高整个电源的输入阻抗,C1、C2组成π型滤波,驱除干扰信号。第二级电路组成电流负反馈,提高恒流输出电流的稳定性。
第一级运放的输出电压:U01=UIN。
第二级运放引入电流负反馈,所以同相端和反相端输入电流为0,因此同相端U+由R3、R4两个电阻对U01分压得到:
运算放大器U2同相端电压U+等于反相端电压U-,因此
,R5的电流I5=
,由于U2反相端输入电流为0,因此发射极电流Ie=I5,又由于Ic≈Ie,因此恒流源电路的输出电流为:
由此可见,电源的输出电流与UIN成正比,且与R3、R4、R5 3个电阻成正比,当UIN和电阻的比例系数保持恒定时,即可保证该电源的输出电流是恒定的。用户既可通过调节选择电池的充电电流,也可以采用软件PWM信号对UIN进行无级调节,从而选择所需的充电电流。
1.3.2 电源电路设计
电源电路将220 V交流电经过变压、桥式整流、电容滤波以及稳压4步,最后得到系统所需的直流电源,电路如图4所示。
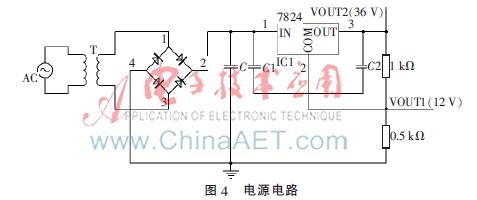
由于上述恒流源电路中的运算放大器U1和U2采用+12 V电源供电,电池所需的直流电压为24 V,同时考虑到以及R5的压降,因此负载所需的电压设计为36 V(此电压可根据具体要求进行调节)。所以电源电路采用7824进行分压以及扩压得到系统所需的12 V和36 V电压。图4中R1取1 k,R2取0.5 k,VOUT1=24×(1+0.5)=36 V,VOUT2=24×0.5=12 V,滤波电容C越大越好,此处取4 700 μF,C1和C2取典型值,分别为0.33 μF和0.1 μF。
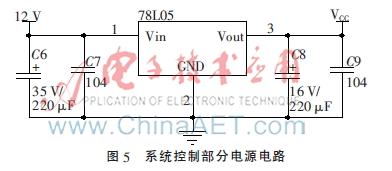
系统控制部分采用直流5 V电源供电,采用三端稳压芯片78L05,如图5所示。其中C6、C7、C8为滤波电容[5]。
1.3.3 充电站定位编码信号发射电路设计

充电站采用发射红外信号的方式引导机器人自动返回充电站,充电站的上、下两组发射器均发出红外信号,为防止充电站发出的红外信号受到阳光、电灯等其他因素的干扰,充电站发射的红外信号采用调制波进行编码,机器人在收到红外信号并解调后,如编码与充电站发射一致,则执行自动充电程序,否则不做处理。
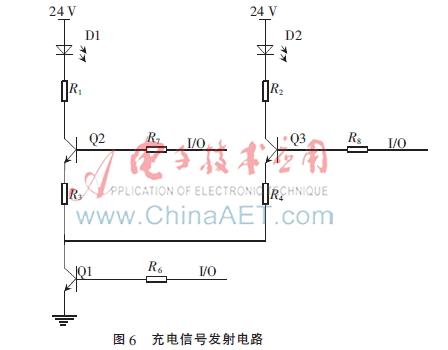
图6中D1、D2为红外发射二极管,R1、R2、R3、R4为限流电阻,用以保证红外发射管工作在允许工作电流内,载波信号由单片机产生,经电阻R6与三极管Q1相连,编码信号由单片机产生,一路经电阻R7与三极管Q2相连,另一路经电阻R8与三极管Q3相连,采用24 V作为发射电压。
2 自主充电算法
清扫机器人自动返回充电时采用随机行走模式,只要充电站正前方的信号区内没有物体遮挡,清扫机器人总会经过有信号区。
充电算法主要分为以下4步:
(1)找寻充电站算法
清扫机器人采用随机行走的方式找寻充电站,途中若遇到障碍物则执行避障算法。清扫机器人随机行走时,只要上部广角接收管收到充电站发出的信号,则认为已找到充电站,进入对接算法程序。
(2)对接算法[6]
在找到充电站后,根据不同情况执行对接算法。
上部广角接收管收到信号,机器继续前行0.1 m,右转,若右转过程中前方中间两个接收管均收到充电站信号,则认为已与充电站对准,机器直行,并进入精确对接算法;若右转400°后,前方两个接收管不满足同时收到信号的条件,则认为机器处于信号边界区域,进入调整方向算法;若前方两个接收管均未收到充电站信号,则认为是误信号,则后退一段距离,继续直行,执行找寻充电站算法。
(3)调整方向算法
调整方向算法:前方两个接收管不满足同时收到信号的条件,则认为机器处于信号边界区域,此时让机器右转,右转过程中,若上部广角接收管收到信号,则机器继续前行0.1 m,再右转,若右转过程中前方中间两个接收管均收到充电站信号,则认为已与充电站对准,机器直行,并进入精确对接算法;若右旋转400°后,前方两个接收管还不满足同时收到信号的条件,则认为机器处于信号左边界,此时让机器后退0.1 m,左转,左转过程中,若上部广角接收管收到信号,则让机器直行0.1 m,再左转,若左转过程中前方中间两个接收管均收到充电站信号,则认为已与充电站对准,机器直行,进入精确对接算法;若左转400°后,前方两个接收管仍不满足同时收到信号的条件,则机器直行,退出调整方向算法,进入找寻充电站算法。
(4)精确对接算法
当清扫机器人中间两个接收管均收到信号时,则认为已与充电站对准,机器保持直行。但实际运行过程中,由于地面情况不同或是电机转速的微小偏差,有可能会使机器在直行过程中发生偏离,为此采用精确对接算法进行修正。

①若对接过程中中间两个接收管的状态为左接收管接收到信号,右接收管无信号,则认为机器向右偏离中心区域,此时机器人左转,若中间两个接收管均收到信号,则直行,若仍然是左接收管接收到信号,右接收管无信号,则机器后退0.1 m,左转,直至中间两个接收管均收到信号后,直行。
②若对接过程中中间两个接收管的状态为右接收管接收到信号,左接收管无信号,则认为机器向左偏离中心区域,此时机器人右转,若中间两个接收管均收到信号,则直行,若仍然是右接收管接收到信号,左接收管无信号,则机器后退0.1 m,左转,直至中间两个接收管均收到信号后,直行。
③若对接过程中中间两个接收管的状态为左、右均无信号,则机器在原地停留2 s,若停留时间内收到充电站信号,则执行相应算法,若2 s后仍无信号,则继续直行,执行找寻充电站算法。
(5)异常情况处理算法
清扫机器人在与充电站对接时,突遇障碍物,此时清扫机器人终止对接算法,执行避障算法绕过障碍物后,继续寻找充电站。
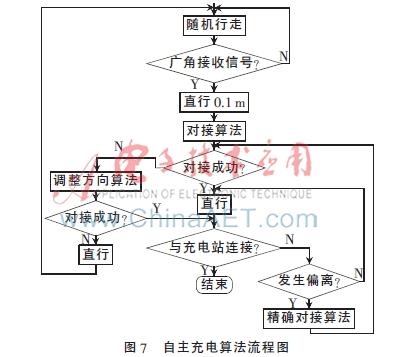
综述自主充电算法步骤:首先机器人根据上部广角接收管是否收到信号寻找充电站进入信号区域,然后做出相应调整使机器人对准充电站直行,最后直行过程中根据中间位置夹角为45°的左和右两个接收器的信号修正和微调机器人的路线,实现精确对准,直到碰到充电站,算法结束。自主充电算法流程图如图7所示。
3 结论
经实践证明,该机器人完全满足自动返回充电功能要求;具有良好的人机交互功能,满足了产品设计要求,只是在找寻充电器的效率方面有待提高。
参考文献
[1] 季国栋,王文理.蓄电池剩余容量检测系统设计[J].微型机与应用,2015,34(3):38-40.
[2] 林丹.一种室内清洁机器人返回路径规划算法[J].重庆科技学院学报,2010,2(1):110-113.
[3] 沈玉,韩廷,武骥,等.一种电动汽车动力电池电流检测系统的设计[J].电子技术应用,2014,40(7):69-71.
[4] 梁喜凤,室内地面清洁机器人路径规划[J].中国计量学院学报,2006,17(1):64-66.
[5] 禹建丽,徐亮.室内自主清扫机器人的路径规划[J].中原工学院学报,2010,21(3):25-30.
[6] 王三武,刘进.清扫机器人移动驱动机构的研究[J]机械制造与自动化,2008,37(5):89-95.

今天上午,科博会上全球最快机器人,机器人人工智能垃圾分类系统吸引不少参观者驻足。本报记者 武亦彬 摄
垃圾分类是今年的一大热词,科博会上专攻垃圾分类机器人赚足眼球。科博会1B展馆内,北京安麒智能科技有限公司带来的“模块化智能资源分拣机器人”,在现场不知疲倦地为观众表演绝活儿——给垃圾分类。
不规则的木头、砖头,各式各样的塑料瓶、易拉罐,源源不断来到传送带,正上方的机器人通过摄像头“眼睛”一扫,识别出来物体的大小、特征,“大脑”迅速判断,立即干脆利落地张开机械手,把垃圾抓起,分类放到不同的箱子里。
“机器人每小时能抓2400次,相当于抓一次1.5秒。”不论是50厘米长的大块木头,还是10厘米长的小砖块、易拉罐,只要在机器人抓取范围内,分拣机器人都不会“放过”。机器人每次最大抓取重量是20斤。
“识别非常难,因为垃圾是不规则、非标准的。”公司总经理李高强介绍,做到这些最关键的就是人工智能。从2017年开始,团队就开始研发人工智能机器人,人工智能需要融入各行各业,在选择细分落地方向时,团队选择当时的“冷门”——还不受关注的垃圾分类。
两年多来,通过深度视觉识别技术,不断训练、学习和迭代,机器人逐渐熟悉各种垃圾的种类、特点,识别准确度越来越高。再加上公司自主研发的高速机器人分拣技术,最终实现一体化智能分拣。
上海浦东,机器人谷,傅利叶智能科技有限公司展厅。
人形机器人GR—1款款走来,“他”身高1.65米,体重55公斤,步行速度5公里/小时,负重达50公斤。“GR—1拥有高度仿生的躯干构型和拟人化的运动控制,具备快速行走、敏捷避障、稳健上下坡、抗冲击干扰等运动功能,是通用人工智能的理想载体。”公司董事长顾捷说。
成立仅8年,傅利叶智能科技自主研发高性能康复机器人,上市产品达30多个系列,进入2000多家医疗机构。“从‘专用机器人’转向‘通用机器人’,我们瞄准未来行业主流,进行攻关。人形机器人具备一定的通用性,在工业、康复、居家、科研等多种应用场景中潜能巨大。通过自主创新,关节等关键零部件已经完全国产化了。”顾捷说。
上海发展人工智能产业起步早,进展快。目前,上海规模以上人工智能企业数量超过350家,产值达3800多亿元,产值约为5年前的3倍。智能机器人集成人工智能、高端制造、新材料等先进技术,是经济增长的新引擎、科技竞争的新高地。
塑造发展新动能新优势,上海布局智能机器人新赛道,加快形成新质生产力。
今年10月,《上海市促进智能机器人产业高质量创新发展行动方案(2023—2025年)》发布,提出到2025年,打造具有全球影响力的机器人产业创新高地;促进三个突破,在品牌、应用场景和产业规模方面实现“十百千”突破——打造10家行业一流的机器人头部品牌、100个标杆示范的机器人应用场景、1000亿元机器人关联产业规模;建设三个公共服务平台,智能机器人检测与中试验证创新中心、人形机器人制造业创新中心、通用机器人产业研究院等;推动制造业重点产业工业机器人密度达500台/万人,机器人行业应用深度和广度显著提升。
规划指引下,上海各区齐发力,努力营造培育智能机器人的产业土壤。
11月14日,在上海智能机器人产业大会临港峰会上,通用机器人产业研究院、临港机器人产业基地正式揭牌,临港新片区智能机器人产业生态联合体成立,一批智能机器人高能级项目集中签约入驻,临港智能机器人产业生态初步形成。
峰会展台前,一个个智能机器人公司亮出看家产品。“这台机器人,能够为光伏电站的光伏组件进行完全无人化清扫和智能化巡检,替代大量的人力工作。”上海织光智能科技有限公司董事长胡德勇介绍,公司致力于为光伏电站提供智能化清扫机器人与智慧化运维系统解决方案。
“临港有人工智能核心企业150多家,研发人员共5000多人。围绕通用机器人、工业机器人、服务及特种机器人、人工智能技术等四大领域,集聚产业链相关企业近40家。”上海自由贸易试验区临港新片区党工委副书记吴晓华介绍,未来将围绕机器人整机、人工智能芯片等10个要素持续发力,进一步筑牢智能机器人产业发展底座,构建智能机器人应用标杆示范区。
产业数据在智能产业领域有着广泛的应用需求,能够助力夯实智能机器人产业基础。
针对产业数据资源多杂散、流通交易链条长等堵点,上海数据交易所与上海合合信息科技股份有限公司11月25日联合成立了产业数据行业创新中心。通过打造一站式产业数据服务新链路、构建场内场外交易融合新范式、探索跨域数据融合新项目3个创新举措,该中心致力于打造合规、公平、可信的数据交易秩序和数商生态,让产业数据从“资源”向“价值”转化。
《 人民日报 》( 2023年12月01日 03 版)